Those who know Audi, know “quattro’’…and once you have driven with quattro, you won’t want to drive any other way. Why? Because this drive system puts engine power to the road in such convincing style. A mere sight of the “four-rings’’ is enough to make out what this logo stands for. Named after the surname of its founder, August Horch, “Horch’’ meaning “listen’’ in German, and “Audi’’ in Latin, the quattro concept was introduced in 1980 on the permanent four-wheel drive “Audi quattro” model and has since been used on all subsequent Audi AWD models. Quattro (meaning four in Italian) simply indicates that AWD technology is used on specific models of its automobiles. What started out as a simple four-wheel drive car has now savored the tastes of myriad of innovations and is now one of the best-selling luxury cars in the world. Let’s see what makes one of the most impeccable models, the Audi RS5 and Audi Q5 that gave rise to a whole new generation of this brand, unique and at the cutting edge of technology. The Audi quattro concept.

The early models of Audi used conventional open differentials at the centre and rear which were manually lockable, except the front differential which wasn’t lockable.(Wondering what a differential is? Click here) These designs posed several disadvantages in our case the wheel(s) lost traction. The reason behind this is the fundamental principle upon which open differentials are based: each of the two wheels on an axle gets the exact same amount of torque, equal to the torque that is available to the wheel with the least traction/grip. For instance, if all the differentials are unlocked, the entire system will go bust even if a single wheel loses traction. Suppose the front right wheel lost traction. This will leave the front left wheel dead on the ground. Now since the front axle can’t rotate, this will stop the rotation of the rear axle too, because the centre differential too, is unlocked. A few other combinations of the centre and rear differentials can be thought of, with each having its own drawback. Thus, this system needed an upgradation.
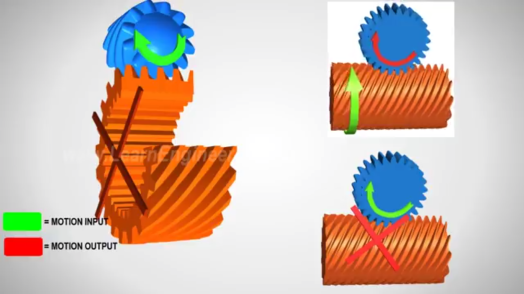
The ingenious mechanism of a Torsen differential then came into picture. It was the brainchild of Vernon Gleasman from Cleveland, Ohio, an inventor and mechanical engineer who holds more than 100 patents. The key to the functioning of this Torsen diff is the principle of a worm gear and a worm wheel: the worm gear can turn the worm wheel but not vice-versa.

Virtually, every aspect of Gleasman’s new gear technology involved ideas that did not exist in traditional engineering textbooks. But he proved those textbooks wrong! Unable to find any suitable existing gear-cutting machines, he bought his own machines and re-designed them to make the new gears. The gear formulae said he couldn’t do it. The handbooks said he couldn’t do it. But they were eventually awe-struck when he proved them all wrong by designing the new gears. He did not use any of the then existing gear formulae in his work. A genius indeed! Torsen differentials, then began being manufactured on a large scale and are used since then by various automotive companies.
A torsen differential basically functions as an open diff as long as the traction is same for both wheels on an axle. In case one wheel loses traction and is about to slip, the advantage of torsen over open diff comes into effect. A pre-determined multiplying factor is set into the diff known as the Torque Bias Ratio(TBR). The torque supported by the slipping wheel multiplied by this TBR is gets transferred to the wheel on the opposite side of the axle having a relatively better grip. The axles then get locked up and rotate as a single solid unit, propelling the car forward. It is to be noted that the torque ratio of the wheel with better grip to that with least grip need not always be equal to the TBR because the sum of the torques cannot exceed the total torque provided by the engine. For example, say the TBR is 4:1, the engine provides a total of 50Nm torque to the rear wheels and the tire with the least traction can only support 20Nm of torque. Then the torque supplied to the wheel with better grip should be 80Nm (20Nm x 4). This would make the sum of torques on the wheels equal to 100Nm. But the engine gave just 50Nm! Hence, the torque to the wheel with better grip will instead be 30Nm to make the sum equal to 50Nm even if the ratio isn’t equal to the TBR. In fact, the torque to the wheel with better grip could be anywhere in between 20-30Nm depending upon how much traction it experiences.
For the same aforementioned example, suppose the tire with the least traction can only support 5Nm of torque. Then the torque supplied to the wheel with better grip should be 20Nm (5Nm x 4). This situation, in contrast to the previous one, results in the torque ratio equal to TBR, even though the total of 25Nm is less than what the engine supplies. Enough Math there!:P Thus, the two cases depict that the torque distribution is limited by the TBR, the traction available at the wheels and the total torque supplied by the engine. This is how the Torsen outweighs its open diff counterpart in asymmetrical traction conditions. But this TBR also brings a major disadvantage alongwith it. The torque distribution to the wheels is dependent upon the traction available at the wheel with the minimum grip and this decides how much torque the other wheel should get. Thus, the Torsen does not actively allocate torque to the wheels (as a computer controlled diff can do). If one wheel goes up in the air, the other wheel won’t get any torque (traction at the wheel in air is zero, hence, TBR multiplied by zero is zero). This makes the vehicle unable to move.

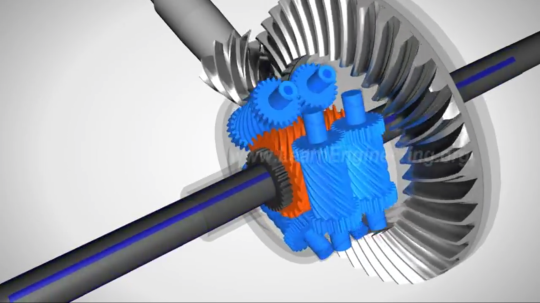
The remedy to this problem was the invention of yet another ingenious type of differential: the “Crown-Gear Centre Differential’’ in the Audi RS5 model that came in the year 2010.

It has a front to rear torque distribution of 40:60 when both front and rear drive axles experience the same traction. However, if the front wheels lose traction, as much as 85% of the available torque can be diverted to the rear wheels having a better grip. Conversely, if the rear wheels lose traction, as much as 70% of the available torque can be diverted to the front wheels having a better grip.


1.Traction at front = Traction at rear


2.Traction at front < Traction at rear


3.Traction at front > Traction at rear
Being a clutch-pack based diff instead of having a TBR, even if one axle completely loses grip, the difference in rotational speeds will generate axial forces, pressing the clutch-pack. The output shafts, thus get locked and majority of the torque flows to the axle with better traction. Moreover, this diff weighs 4.8kg, about 2kg lighter than Torsen. Hence, the Crown-Gear centre diff compensates for the limitations of the Torsen diff.
Thus, the type of centre diff used in the Audi models changed generation after generation, each improving upon the faults of the previous one. Initially the open diff, then Torsen and finally the Crown-Gear in the 2010 model RS5. And since all these models are permanent four-wheel drives, it really calls for a state-of-the-art centre diff that seamlessly distributes torque between the front and rear axles, irrespective of the traction conditions. But another area where Audi didn’t leave a chance to amaze the technological enthusiasts was the innovation brought about in the design of the rear differential. Unlike the conventional types of limited slip differentials used in most cars, Audi uses a sport differential, first incorporated in the S4 Sedan model of 2008. The electronically controlled diff is regulated by a computer software built by Audi itself which reacts within a few hundredths of a second. Among other unique features, torque vectoring is a feature very well-characterized in this diff.

In simple terms, torque vectoring means creating a difference in the braking or driving forces at each wheel to generate a yaw moment (or torque). A torque vectoring differential (TVD) performs the basic diff tasks while also transmitting torque independently between each wheel. In other types of differentials, like open, LSD and Torsen, the torque distribution between wheels on the same axle is dependent on each other and each wheel is not monitored individually to know how much torque it can actually needs. Also, these are all mechanical systems that come with lots of losses associated with them. Even in a clutch-pack LSD, in case the pack gets pressed too much during fast cornering, it may result in understeer due to lots of traction available at the outer rear wheel. Clutch-pack wear is another problem associated with it. In contrast, a TVD, though mostly constituting of mechanical components, is electronically controlled, and as should be obvious, will react to situations much more quickly than other diff types. With various types of sensors governing the different functions of a vehicle, the controller precisely gets inputs as to how much torque an individual wheel actually wants and that same amount of torque is supplied to it. Thus, each wheel is individually monitored, leading to a better control over the vehicle maneuvering.



When cornering, more power is sent to the outer rear wheel, generating more turning force (yaw). This pushes the car into the bend so that it follows the angle of the front wheels. Moreover, the difference in the tractive force between the left and right wheels exert an additional steering effect so that sharp corners can be taken with smaller steering angles than normal. All due to the generation of the additional yaw moment.
Coming to the unique sport differential. Being a TVD like a lot of other diffs that are electronically controlled, what’s so “unique’’ about it? The uniqueness lies in its design and the way electrical inputs regulate the torque transfer to the individual wheels. At its core, it is an open differential but has a set of overdrive gears mounted on its left and right sides. The overdrive gears on one side are connected to the differential output via a multi-plate clutch operated electro-hydraulically.

Overdrive gears are simply meant to rotate the output shaft at a speed greater than the input shaft. The output shaft rotates 10% faster than the half-shaft that normally drives the wheel. The multi-plate clutch couples both. When a torque division is desired, the clutch-pack connects the overdrive gears to the diff output, thus accelerating the wheel much faster than it would be possible through a normal half-shaft. This results in the additional torque being drawn from the opposing wheel via the differential. In this way, the electronically controlled sport diff monitors the torque requirements of the individual rear wheels.


Having covered the design and functional aspects of the centre and rear differentials, we are left with the front diff. This diff is simply an open diff with Electronic Differential Lock (EDL) incorporated in it. Speed sensors are integrated into the wheels of the vehicle that sense the individual wheel spin. When a wheel loses traction and spins, the EDL uses the wheel brake to slow down this wheel, allowing more traction to be passed to the high traction wheel via the diff action. This type of diff was used as the rear diff of some Audi models too, later replaced by the sport diff.
In February 2016, Audi launched the Audi Q5 model(Audi Quattro with ultra-technology), capable of switching between four-wheel drive and the more efficient front wheel drive. The Audi RS5 is a permanent 4WD because the crown-gear centre diff continuously delivers torque to both the front and rear axles. Audi Q5 too, has the same longitudinal arrangement of the engine and transmission as the RS5, making both these models “nose-heavy’’.

What’s different and moreover, unique in Q5 is that the central driveshaft can be fully de-coupled from the front and rear, converting the four-wheel drive into a front-wheel drive system. This driveshaft is connected to the transmission via a multi-plate clutch and to the rear axle differential via a de-coupler.

During normal road conditions when 4WD needn’t be used, the multi-plate clutch at the front and the de-coupler at the rear axle differential open, disconnecting the driveshaft and the engine power is no longer supplied to the rear end, converting the vehicle into a front-wheel drive system. When driving situations call for a 4WD setup, the de-coupled components again close-up and engine power is transmitted to the rear end via the driveshaft.

The FWD in Audi Q5 has been regarded as more efficient due to the obvious fact that when the driveshaft is de-coupled from the rear wheels, this cuts out the drivetrain losses at the rear end and fuel can be saved in this way.
Summing up, these two recent Audi models are just two of the many other models that have used state-of-the-art technologies in them, stuff that amazes automobile enthusiasts. It’s one thing to actually own such a car and enjoy the ride like never before, but once you understand what goes into making these precisioned vehicles, it really leaves you with a thought: “How do they do it?”. These companies come up with new models time and again with another upgraded feature or design that catches the limelight. The competition just doesn’t stop. It’s what makes Audi, “Audi”!
![Audi-Sport-Quattro-4[2].jpg](https://engineerinthemechingblog.files.wordpress.com/2018/01/audi-sport-quattro-42.jpg?w=594&h=396)
